
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Proin ullamcorper tellus sed ante aliquam tempus. Etiam porttitor urna feugiat nibh elementum, et tempor dolor mattis. Donec accumsan enim augue, a vulputate nisi sodales sit amet. Proin bibendum ex eget mauris cursus euismod nec et nibh. Maecenas ac gravida ante, nec cursus dui. Vivamus purus nibh, placerat ac purus eget, sagittis vestibulum metus. Sed vestibulum bibendum lectus gravida commodo. Pellentesque auctor leo vitae sagittis suscipit.
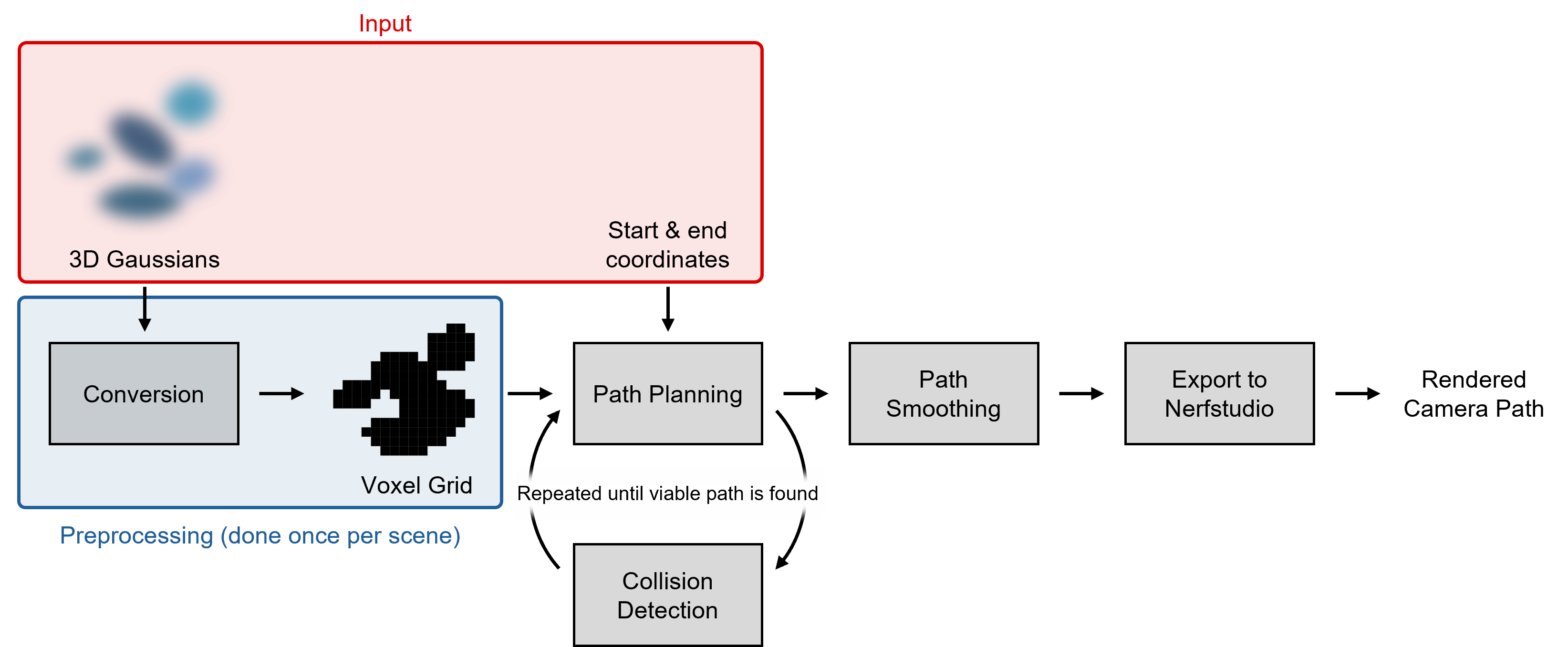
Our pipeline. The 3DGS scene is converted to a voxel grid, which is then used for collision detection. The camera path is generated using the Open Motion Planning Library (OMPL) and smoothed before being exported to Nerfstudio for rendering.
| 3DGS Paper | Bernhard Kerbl, Georgios Kopanas, Thomas Leimkühler, and George Drettakis. 2023. 3D Gaussian Splatting for Real-Time Radiance Field Rendering. arXiv:2308.04079 [cs.GR] https://arxiv.org/abs/2308.04079 |
| OMPL | Ioan A. Şucan, Mark Moll, and Lydia E. Kavraki. 2012. The Open Motion Planning Library. IEEE Robotics & Automation Magazine 19, 4 (December 2012), 72–82. https://doi.org/10.1109/MRA.2012.2205651 https://ompl.kavrakilab.org |
| Nerfstudio | Matthew Tancik, Ethan Weber, Evonne Ng, Ruilong Li, Brent Yi, Justin Kerr, Terrance Wang, Alexander Kristoffersen, Jake Austin, Kamyar Salahi, Abhik Ahuja, David McAllister, and Angjoo Kanazawa. 2023. Nerfstudio: A Modular Framework for Neural Radiance Field Development. In ACM SIGGRAPH 2023 Conference Proceedings (SIGGRAPH ’23). |
| Stonehenge dataset | Splat-Nav: Safe Real-Time Robot Navigation in Gaussian Splatting Maps. arXiv:2403.02751 [cs.RO] https://arxiv.org/abs/2403.02751 |
| Stonehenge Icon | https://en.silhouette-ac.com/silhouette/139528/stonehenge |